TEPIA 先端技術館
- HOME
- TEPIA 先端技術館
- TEPIAチャレンジ助成事業
- 経過・結果レポート一覧
- ロボットグランプリ2019レポート①

経過・結果レポート
ロボットグランプリ2019レポート①
2019.11.13
2019年11月3日(日)、TEPIAチャレンジ助成事業の成果発表大会「TEPIAロボットグランプリ2019」が
TEPIA先端技術館 3階エキシビションホールで開催されました。
第4回目となる2019年のテーマは「Beyond ~超える・越える~」。
全国から採択チームの全10チームが集まり、プレゼンテーションとロボットの実演により開発成果を披露しあいました。
今年も審査委員長に千葉工業大学未来ロボット技術研究センター所長 古田貴之氏をお迎えし、開会式でご講演いただきました。
短い時間でしたが、古田先生が開発しているロボットのことなど、貴重なお話をしていただきました。

【午前の部】
①相模女子大学中学部 March 「キャンパス クリーン ロボット

TEPIAロボットグランプリ史上初の女子だけのチーム。
学校の敷地が東京ドーム4個分もあり、学園祭には、毎年20,000人を超える来場者があるため、
その後のごみの掃除が大変だということに着目し、自動でごみを拾ってくれるロボットを考えました。
ごみの分別のことも考え、ペットボトルを集める「ペットちゃん」と可燃ごみを集める「可燃くん」の2台を作り、将来的には連携も構想。
今回はミニチュア版の試作機での実演となり、ペットボトルに見立てたミニボトルやごみに見立てたブロックを回収していく様子を
見せることができました。

構想はあっても、今回取り入れられなかった機能もあったとのことで、また、古田審査委員長からも大きな公園で使うために
考えなければいけない要素等のアドバイスもあったので、それを踏まえてぜひ実物大のロボットも考えて欲しいです。
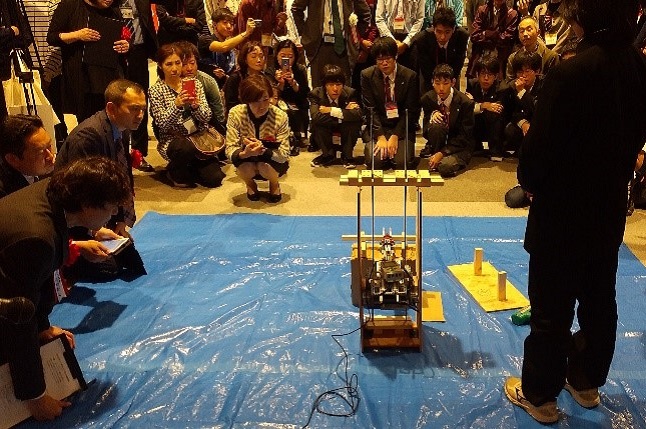
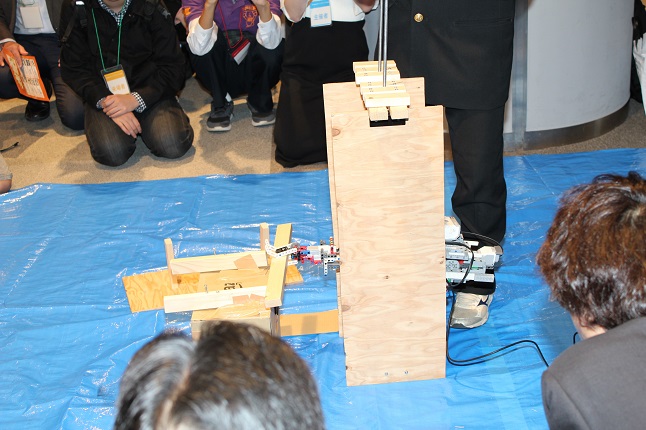
②茨城県立竹園高等学校 SS 「higher」

建設業における労働災害の発生状況を考え、墜落、転落、落下による事故が多いことに着目。
ロボット自身がレールを敷いて登っていき、作業もするというロボットが、高所での作業を代わりに行うことができれば、
建設業における事故が減るのでは?という思いから考えました。
上下運動、前後運動の機構を考え、上下運動については自動で動くところまでは実装できなかったのですが、
実演では、自動でアームが前後に移動し、木の棒をつかんで離れた位置の台の上に置く、という動きを行いました。
残念ながら、時間内には収まりませんでしたが、実際に使われる時にはもっと大きなものが必要となるという審査員からのアドバイスを踏まえ、
開発を続けて欲しいと思います。
③八戸工業大学第二高等学校附属中学校 工大二附属中1年A組 「Bag Carrier」

電子工作もプログラミングも全く経験のない完全初心者のクラスメイト4人が、吹奏楽部の顧問の先生とチームを作り、初めてのロボット開発に挑戦。
脚の不自由な友人が重い荷物を持って階段を上がるのが大変な様子を見て、その荷物を運んでくれるロボットを考えました。
完全初心者チームながら、キットやLEGOを使わず、Arduinoでのプログラム制御、センサリング、そして階段を昇るアイデアの実装まで挑戦し、
形にしました。


実演では、時間中に階段を登る動きがうまくできなかったのですが、他のチームの発表中に修理を行い、昼休みには車輪部分が動くところが見られ、
一所懸命に動かそうとする彼らの頑張りが伝わってきました。
④慶進高等学校 科学部 「OKUTO」
メンバー全員プログラミングやロボット開発未経験者で配線やプログラミングを勉強することから始めたこのチーム。
昨今、災害が多いことなどから、災害時に役立つロボットを作りたい、と開発を始めました。
ただ、学校には開発のための設備も整っていないため、材料に切り出しに片道1時間半もかかる場所まで行かなければならないなど苦労しました。
8本の脚のうち4本に車輪、残りの4本に吸盤を付け、垂直な壁を登る計画です。
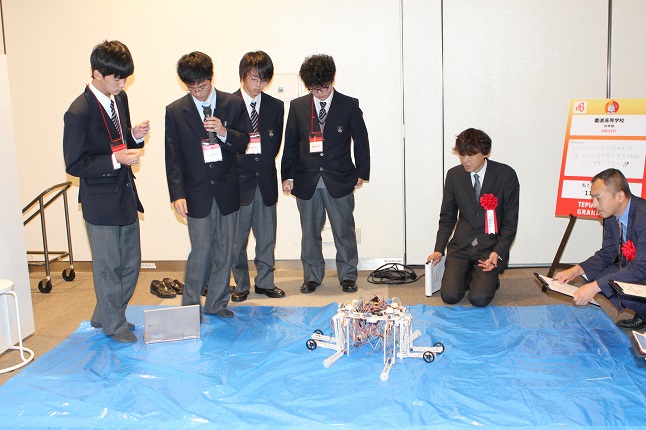
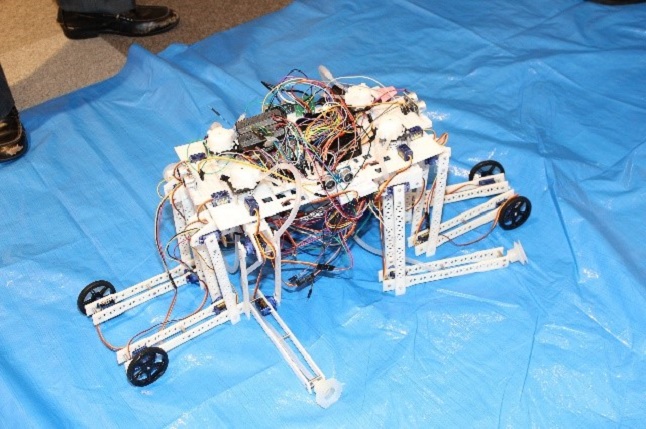
実演では、8本の脚を同時に動かすことはできませんでしたが、やる気と頑張りは伝わり、 審査員の方々からは、動かない原因を突き止めるために、
シンプルな形にした方が良い、 最終系の形をまず決めるのではなく「何をしたい」ということから形を検討していった方が良い等のアドバイスがありました。
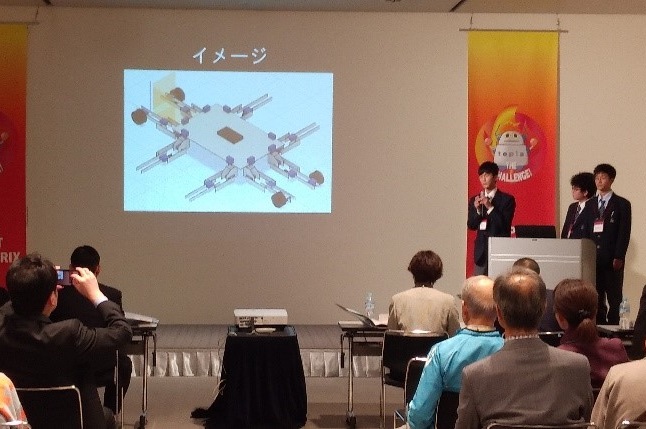
⑤渋谷教育学園幕張高等学校 物理部 「対話応答型飛行システム「CoRFS(コーファス)」」

人々が抱えるドローンに対する恐怖心の改善を主な目的とする、画像認識を利用したコミュニケーションが可能な、屋内専用のドローンを作りたいと開発を始めました。
小型・軽量・安全なドローンを自作して制御することは困難で、様々なトラブルの後、既存のドローンを使用することにしましたが、
人とのコミュニケーションシステムでは、顔検出から口の動きを瞬時に捉え、読唇術で命令を認識するということを、機械学習を使って挑戦しました。
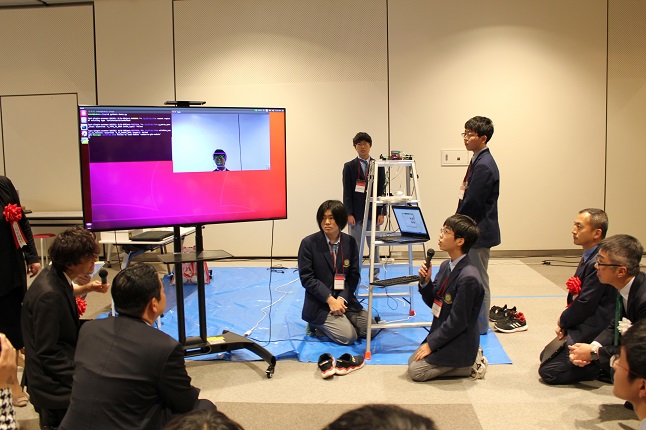

実演では、人の顔から口を認識して、口をあいたときの縦の長さが一定以上になった時の時間で検出を始めるというデモを行いました。
残念ながら時間内には顔をとらえるところまでしかできませんでしたが、古田審査委員長からは、取り組んでいる事が高度であると褒められ、
もっと多くのデータ数を集めないと、唇を検出する際に個人差が出てしまうというアドバイスがあり、
続けていけばもっと良いものになる、という激励もありました。
5チームの発表を終え、【午前の部】は終了。
休憩をはさんで行われた【午後の部】のレポートは近日公開予定です。